6328 A-Çerçeve Pivot 2023

Bağlantılar
ChiefDelphi OpenAlliance Build Konusu
Tasarım Arkasında
Birçok durumda, pivotlu kollar bir robotun mimarisindeki temel mekanizmadır. Bu nedenle, sağlam, güçlü ve hızlı pivot mekanizmaları iyi bir tasarımı yapabilir veya bozabilir. Tam kol uzantısında bu pivot eklemine uygulanan devasa moment yükü nedeniyle, bu pivots sürücü mekanizmasının hem güçlü hem de kurşun geçirmez olması esastır.
Pivot Kol üzerinde Kuvvet Analizi
Tork, iki ana değişkenin işlevidir: uygulanan kuvvetin büyüklüğü, dönüş ekseninden kuvvetin uygulandığı yere olan mesafe (genellikle kol veya moment kolu olarak adlandırılır) ve kuvvetin uygulandığı açı. Yerçekimi tarafından bir nesnenin kütlesine uygulanan kuvvet, eşdeğer olarak nesnenin ağırlık merkezine uygulanan tek bir kuvvetle temsil edilebilir. Tam kol uzantısında, momentum kolu ağırlık merkezi pivot ekseninden maksimum mesafededir ve yerçekımı momentum kolu üzerinde ağırlık merkezinde 90 derecelik bir açı ile nokta yük uygular, bu noktada pivota uygulanan tork bu kuvvetün ağırlık merkezinden pivota olan mesafe ile ÇARPILMASIDIR.
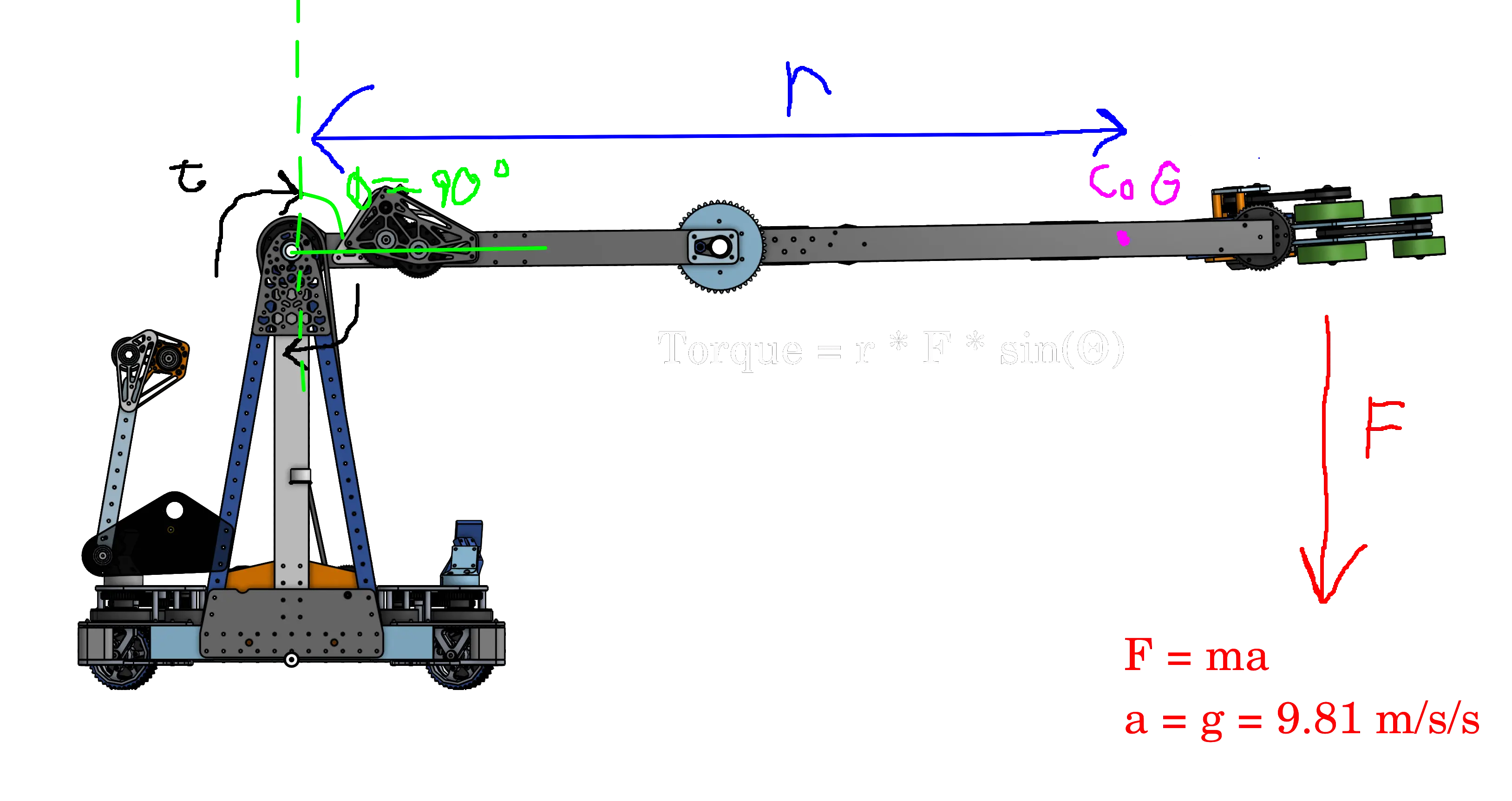
Ana pivot eklem üzerindeki bu dev moment yükü, pivot mekanizmasının hem bu büyük torku kırmadan handle etmek için yeterince dayanıklı olarak inşa edilmesini hem de pivotun sürülebilmesi için bu torku karşıtı ve üstesinden gelebilecek kadar güçlü olmasını gerektirir. Böyle pivot kolları için sürücü mekanizmaları ve şanzımanlar tasarlarken, kolunuzun uzunluğuna ve kütlesine bağlı olarak kolunuzu sürmek için ne kadar güçlü bir mekanizmaya ihtiyacınız olacağına dair iyi bir tahminde bulunmak genellikle çok yararlıdır, bu nedenle birçok tasarımcı Reca.lc Kol Hesaplayıcısı veya AMB Mekanizma Oran Hesaplayıcısı gibi simülatörler kullanır.
Aşağıdaki analiz, ChiefDelphi'deki 6328 OpenAlliance konusundan bir alıntıdır, FRC 6328'den Matthew3 tarafından yazılmıştır
Geliştirilmiş Tasarım
Özel Şanzıman
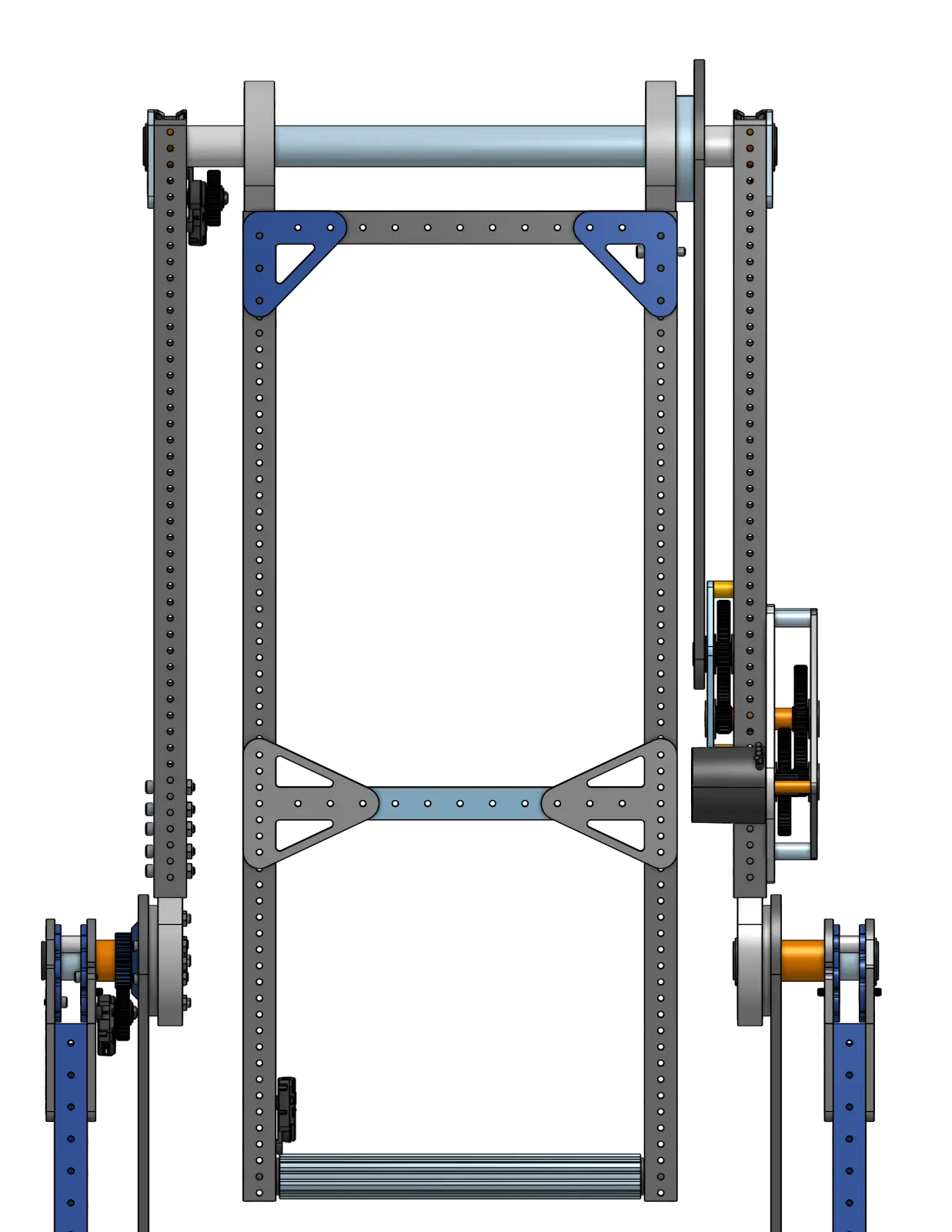
MAXPlanetaries'in sınırlı bulunabilirliği ve belly pan alan kısıtlamaları nedeniyle, ilk eklemi güçlendirme yolumuzu yeniden değerlendirdik. Şanzıman, belly panın alçak bir yerine yerleştirilecek ve bir dead-axle MAXSpline güçlendirecek, buradan onu iki ilk eklemle zincirleyeceğiz. Bu, önceki yaklaşıma göre birkaç büyük avantaja sahiptir: paketleme, ilk iki eklemi mekanik olarak bağlama, robotun ortasından geçmeyi kolaylaştırmak için sınırlı stick out ve birkaç MAXPlantary kartuşunu ortadan kaldırma.
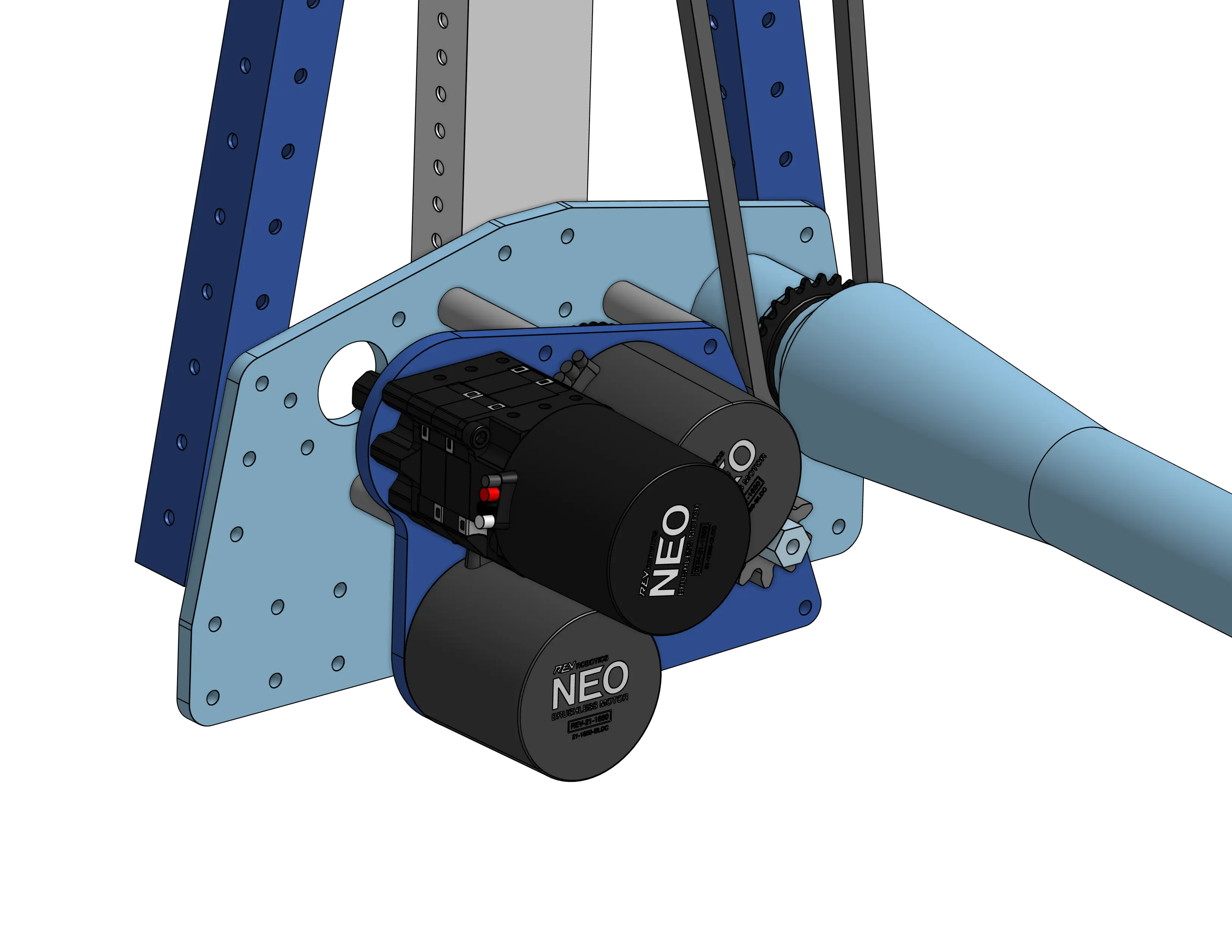
İki alt NEO, robotun genişliğini geçen MAXSpline'ı güçlendirirken, MAXPlanetary NEO küp toplayıcının eklemini güçlendirir.
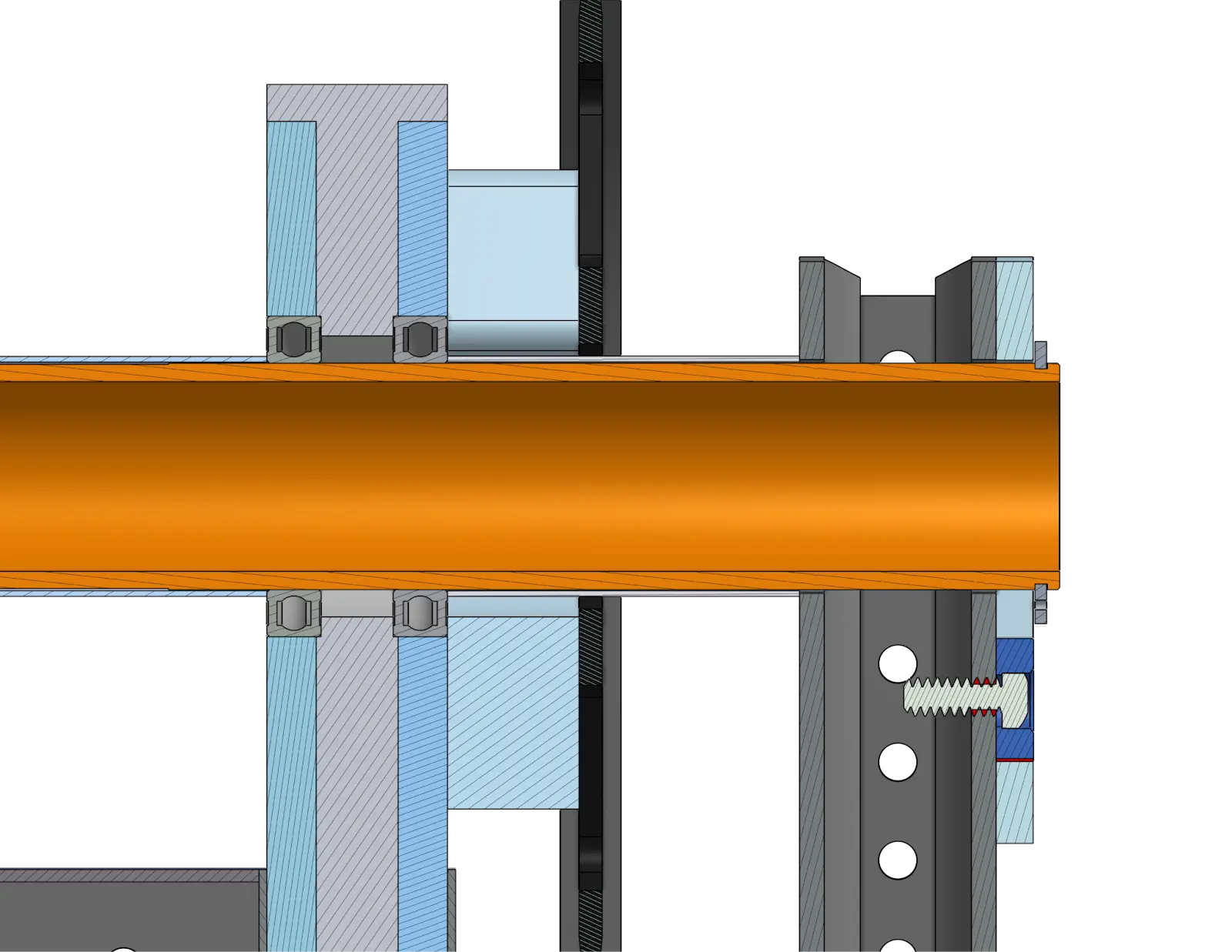
Yeni birinci eklem dead axle'leri için, rulmanlar için 1.25" 0.25 duvar boruyu 30mm'ye dönüştürüyoruz. Dead axle'ları tutmak için, 971'in 2018 robotundan ve dead axle'ı tutmak için mitee-bites kullanımından ilham aldık.
Bunun için, boru etrafında boşluk için ve temas noktalarını seçici olmak için ilginç bir profil içeren "dış" 0.25 alüminyum plaka kullanıyoruz. İç plakada, hareket edebilen plakada, aynı profil kullanılır ancak 180 derece çevrilir.
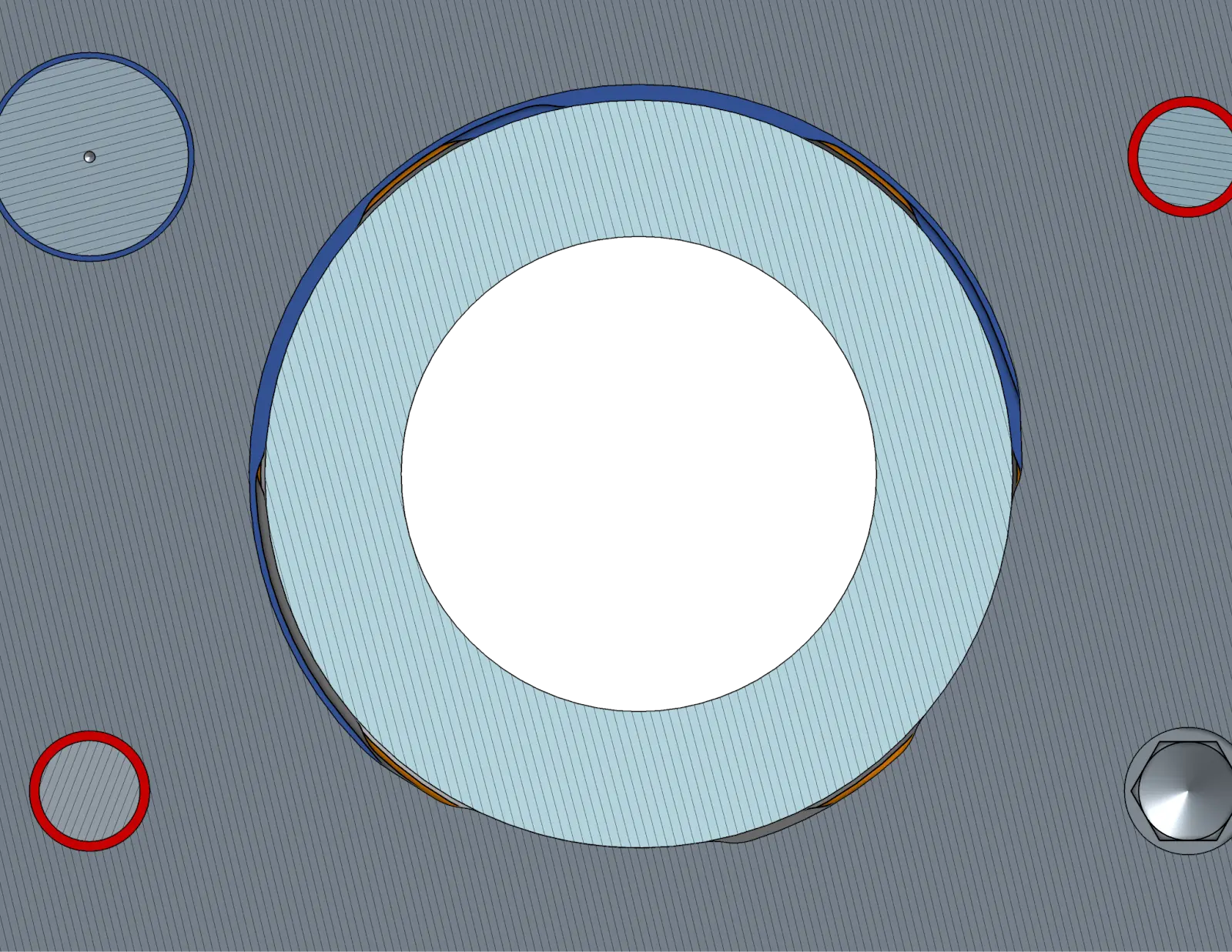
Bu iç plaka, biraz büyütülmış deliklerde (0.005") birkaç cıvata ile monte edilir. Dış plakaya tap ederler ve mavi plakadaki boşluk delikleri mavi iç plakanın biraz hareket etmesine izin verir. Bu, mitee-bite sıktığınızda, dead-axleyi yerinde sıkıştırır. Bu sistemin dead-axle için güvenli montaj için yaklaşık 1800 lbs sıkma kuvveti sağladığını hesapladık. Ayrıca, dead-axle'ı değiştirmemiz veya eklemi değiştirmemiz gereken biraz extreme senaryoda kolayca değiştirebileceği anlamına gelir.
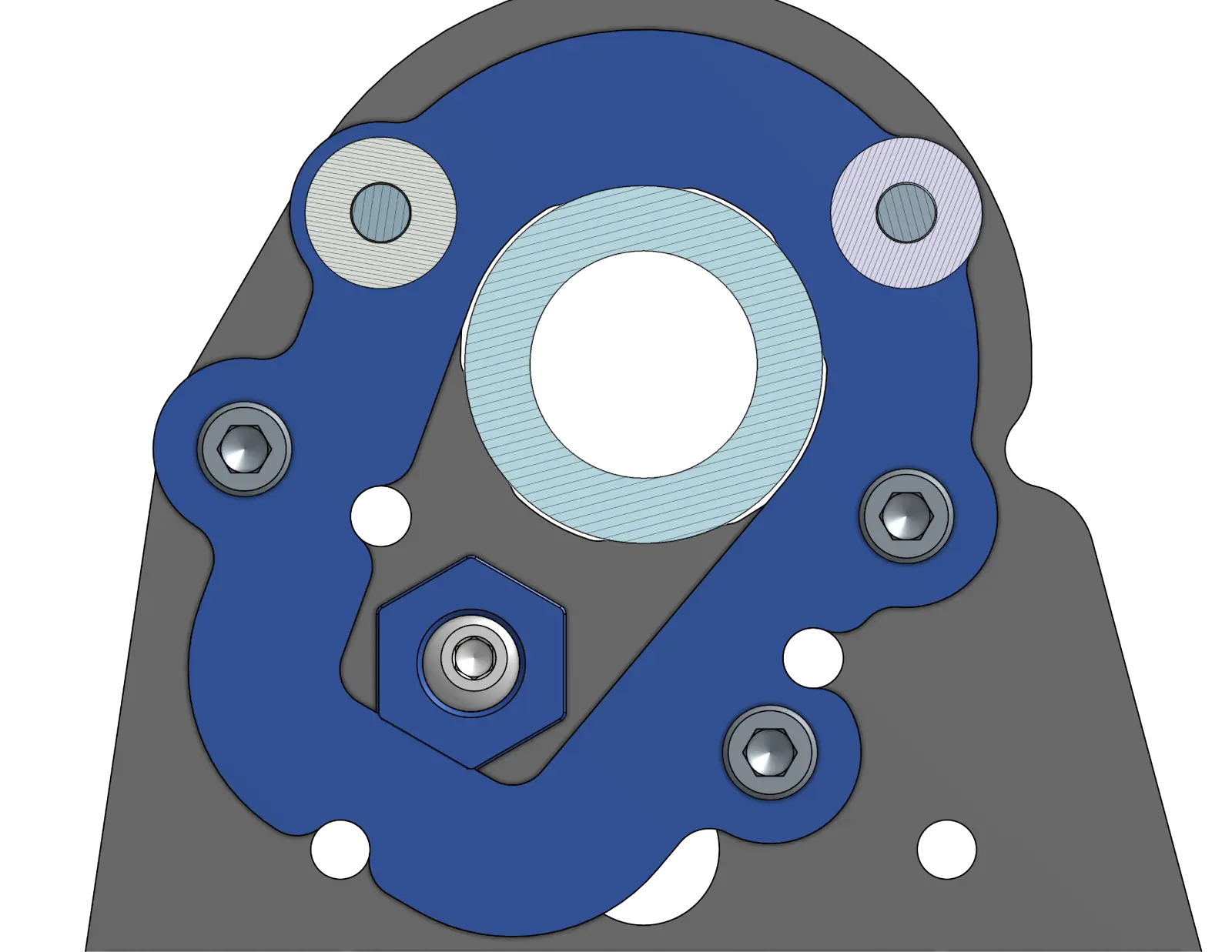
Bu stackup, iki snap ring (98541A134) içinde yer alır. Bu en dış kısıtlama, mitee-bites'in başarısız olduğu "en kötü durum senaryosu" içindir. İç snap ring, stackup'ı bir arada tutmak için esastır.
Eklemnin kendisine geçelim, önceki tasarım bu için live axle MAXspline idi, bu birkaç küçük soruna sahipti, ama kesinlikle ileriye doğru düzeltmek istediğimiz şeyler. Gerçek bir dead-axle'e geçişle, tüm bu sorunları (umarım) çözüyoruz.
Eklemnin kendisine bakarsanız, bağlantı borusunu ve bu bağlantıya bağlanan eklemi göreceksiniz, bu onarılabilirlikte drastik bir iyileştirmedir ve bizim için bir gereklilikti. Ayrıca bağlantı borusunu ince duvarlı MAXtube'dan kalın duvarlı MAXtube'ye geçirdik. Eklemnin kendisi, PA12-CF naylon 3d baskılarda yakalanmış 0.25" alüminyum plakalardan oluşur. Aşağıdaki resimde, naylon parçanın (açık gri) içinde yakalanmış alüminyum plakayı (açık mavi) görebilirsiniz. Alüminyum plaka rulmanı alırken naylon parçası onu yakalar ve boru içinde yerleştirir (MAXtube'nin içinde tarafının daha karmaşık geometrisini oluşturur) ve rulmanların yan yana için bir boşluk oluşturur.
Encoder, kasnağın tarafından çıkan ve önceki tasarımla aynı sistemi kullanan 3d baskılı bir parçadır.
İkinci Eklem
İkinci eklem, kolun çoğu sorununa ev sahipliği yaptı. Bu çoğunlukla ilk başlarken tasarım açısından en kolay görünen şeyi almamızdan kaynaklandı. Hatırlatmak için, önceki eklem 3 kademe max planetary ve 32t'den 80t'e dişli reduksiyonuydu. Çok basit bir eklem, ancak en iyi durumda sorun doluydu. MAXplanetary'de önemli miktarda backlash vardır, hepsi presli boru blokları ve böyle bir şeyle monte edilmiştir, neredeyse imkansızdır parçalamak ve MAXspline'ın kendisinde önemli bir yay vardır. Bu sorunları aklında tutarak, yeni tasarıma bakalım.
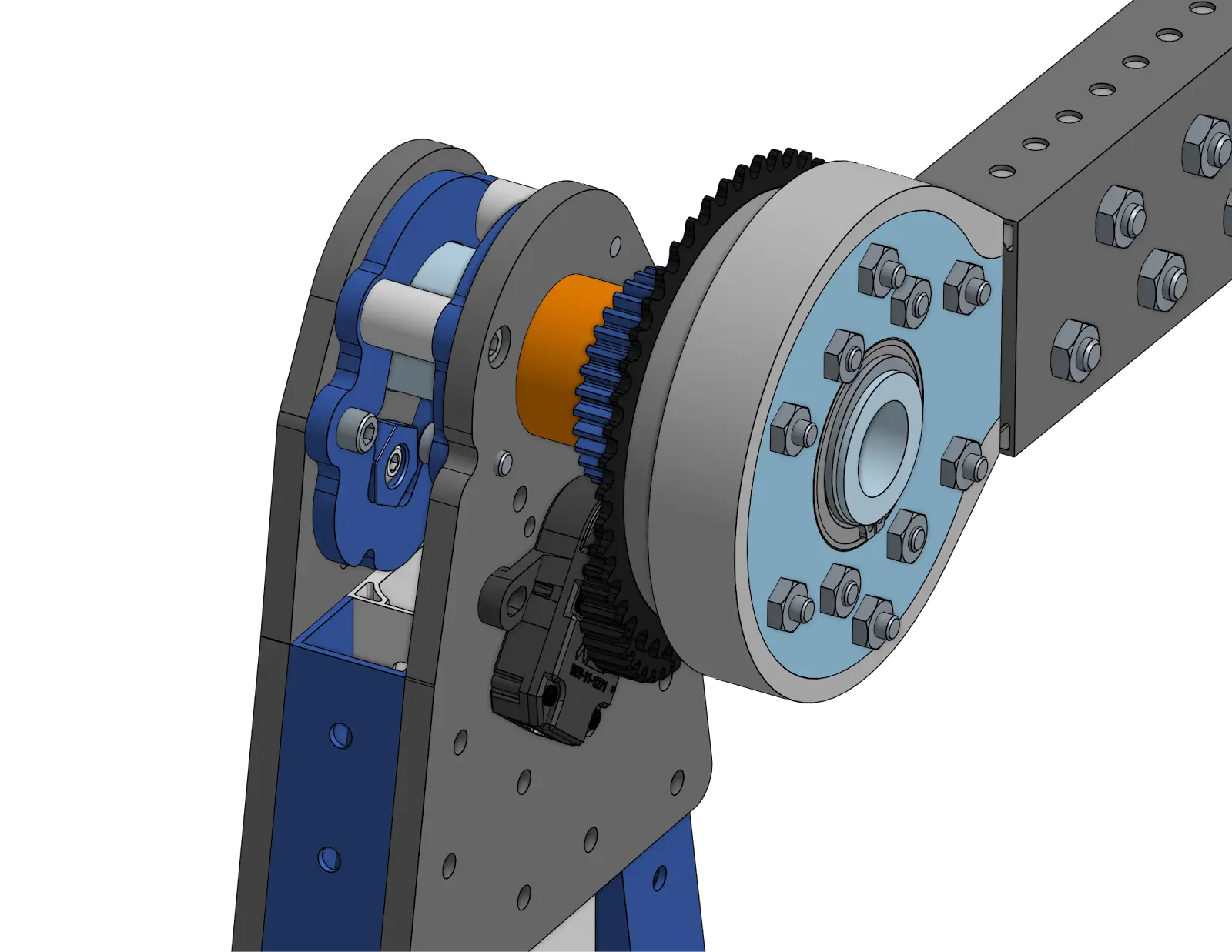
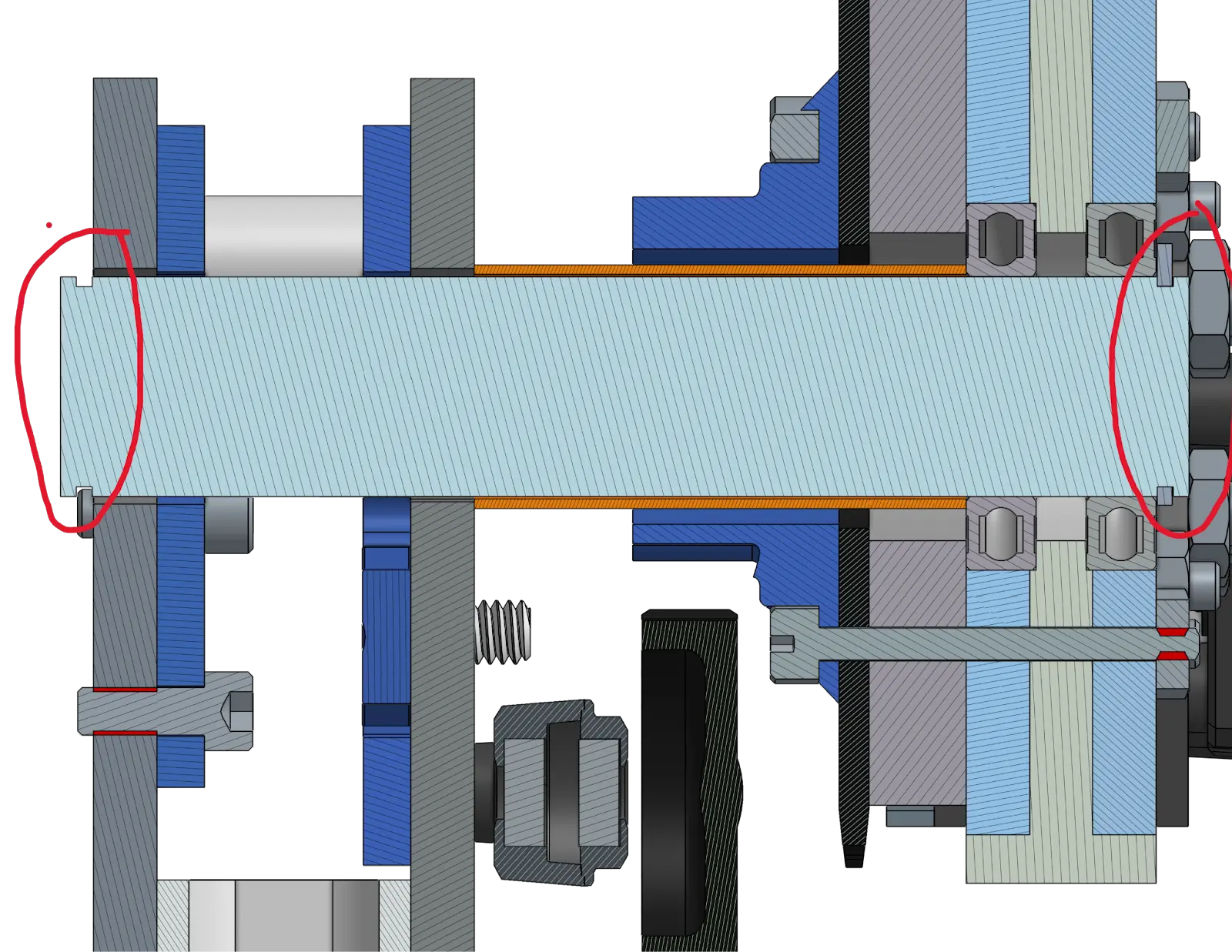
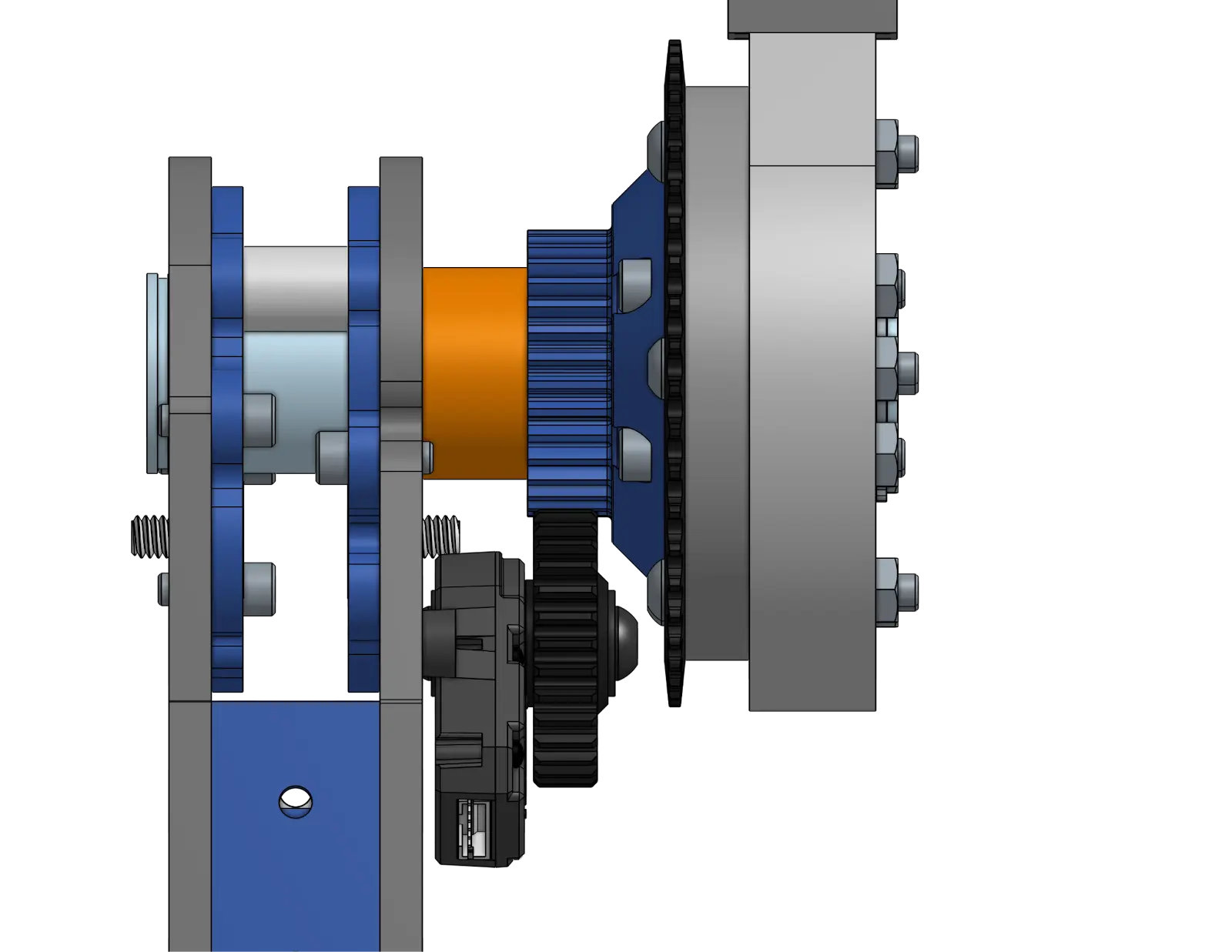
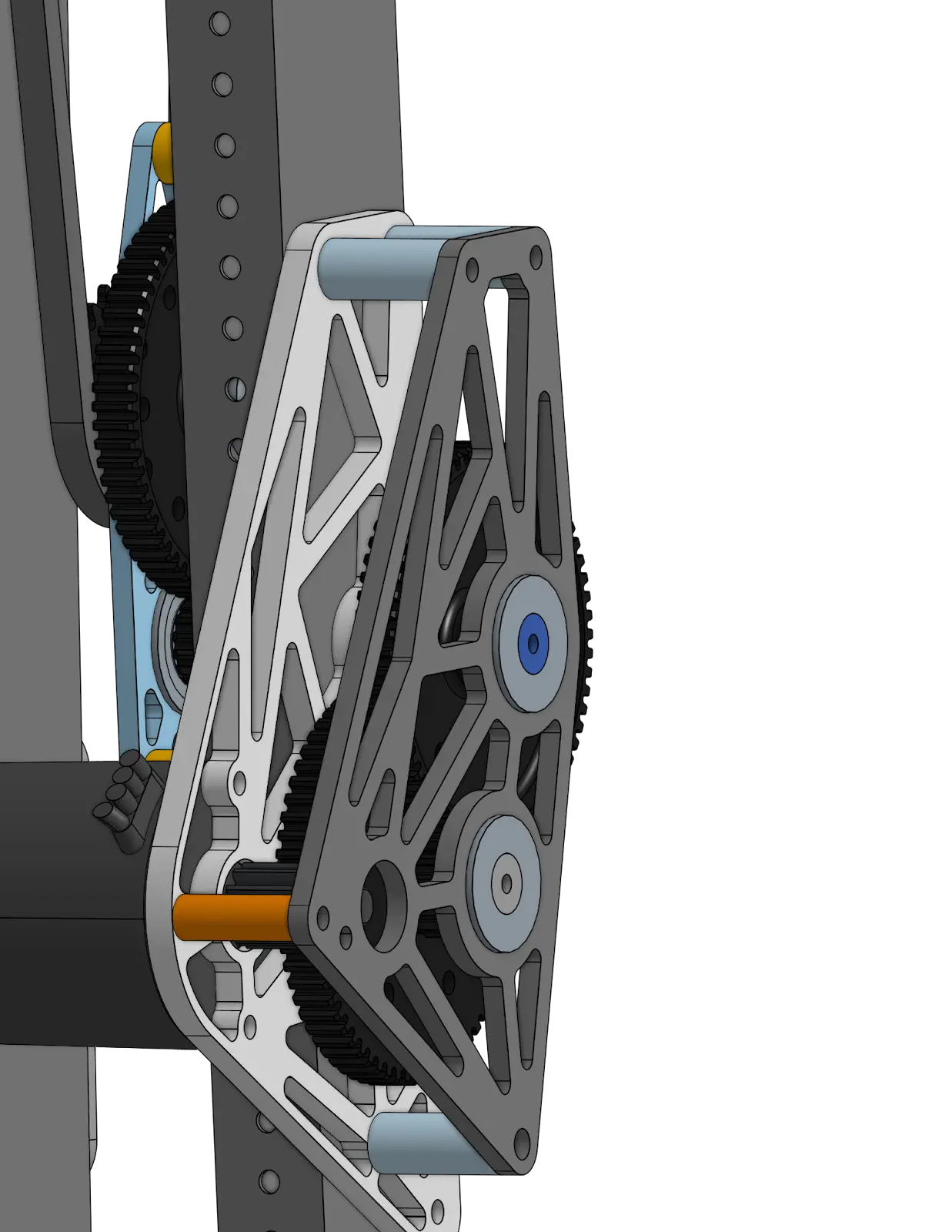
Bu eklem ilk eklemeye oldukça benzer. Dead axle, birinci eklemde çok benzer bir sistem ile sıkıştırılır, alt plaka (açık mavi) dead axle'ı ilk boru üzerine sıkıştırır. Milin dışında borunun kayması durumunda en kötü durum senaryosu için snap ringleri vardır.
Dead axle borusu (turuncu), rulmanın iç yarısı ve dış boru ile temas eden ince duvarlı alüminyum boru (1.25 OD 0.028 duvar) spacer olarak davranır. Dead axle (turuncu boru), montaj nedenleriyle borunun geri kalanının 30mm OD'sinden (rulmanların temas olmadığı uzunluk) 0.005" daha az dönüştürülmüş bir uzunluğa sahiptir.
Bu sistem (umarım) yayı azaltacak ve eklemleri borulardan ayıracak, onarılabilirliğe yardımcı olacak.
 |
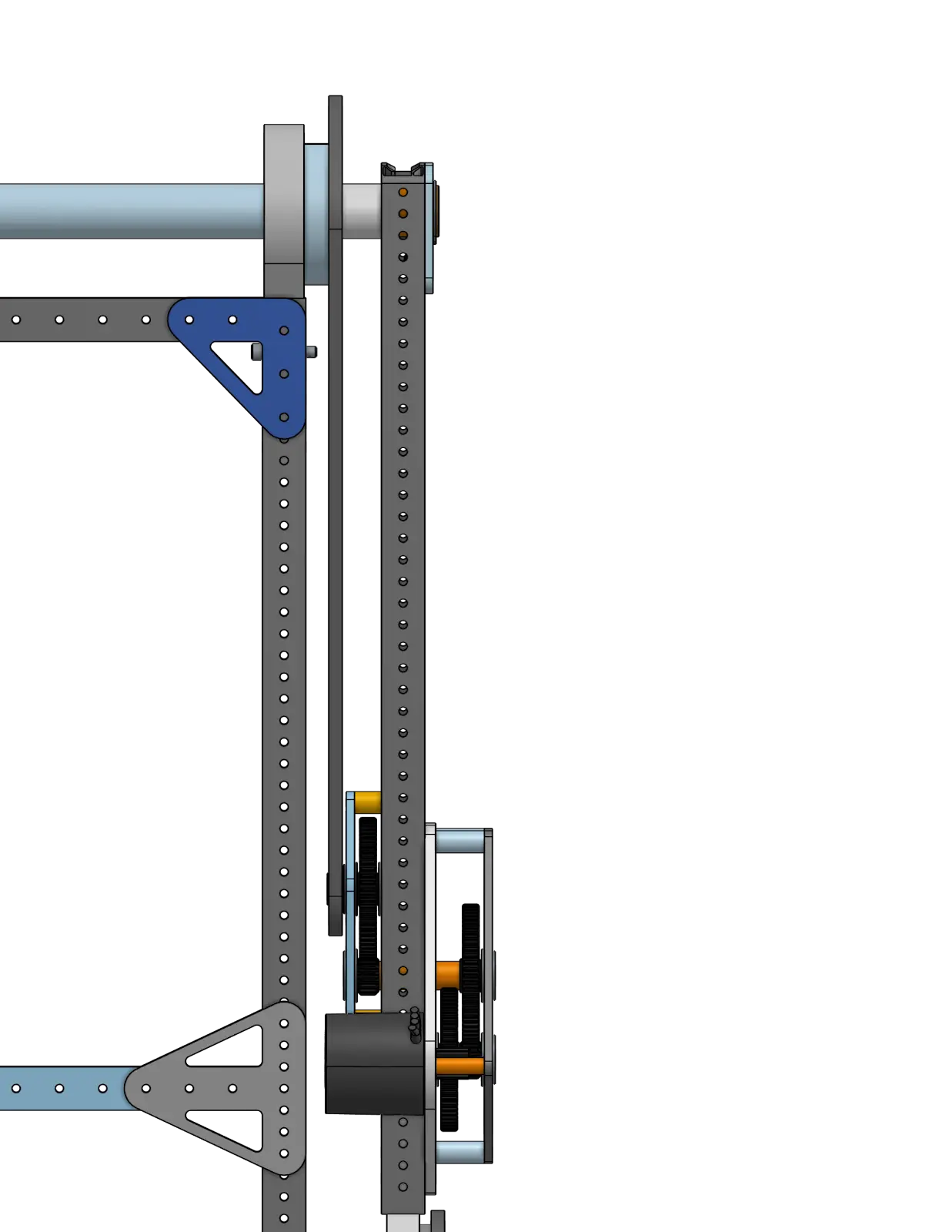 |
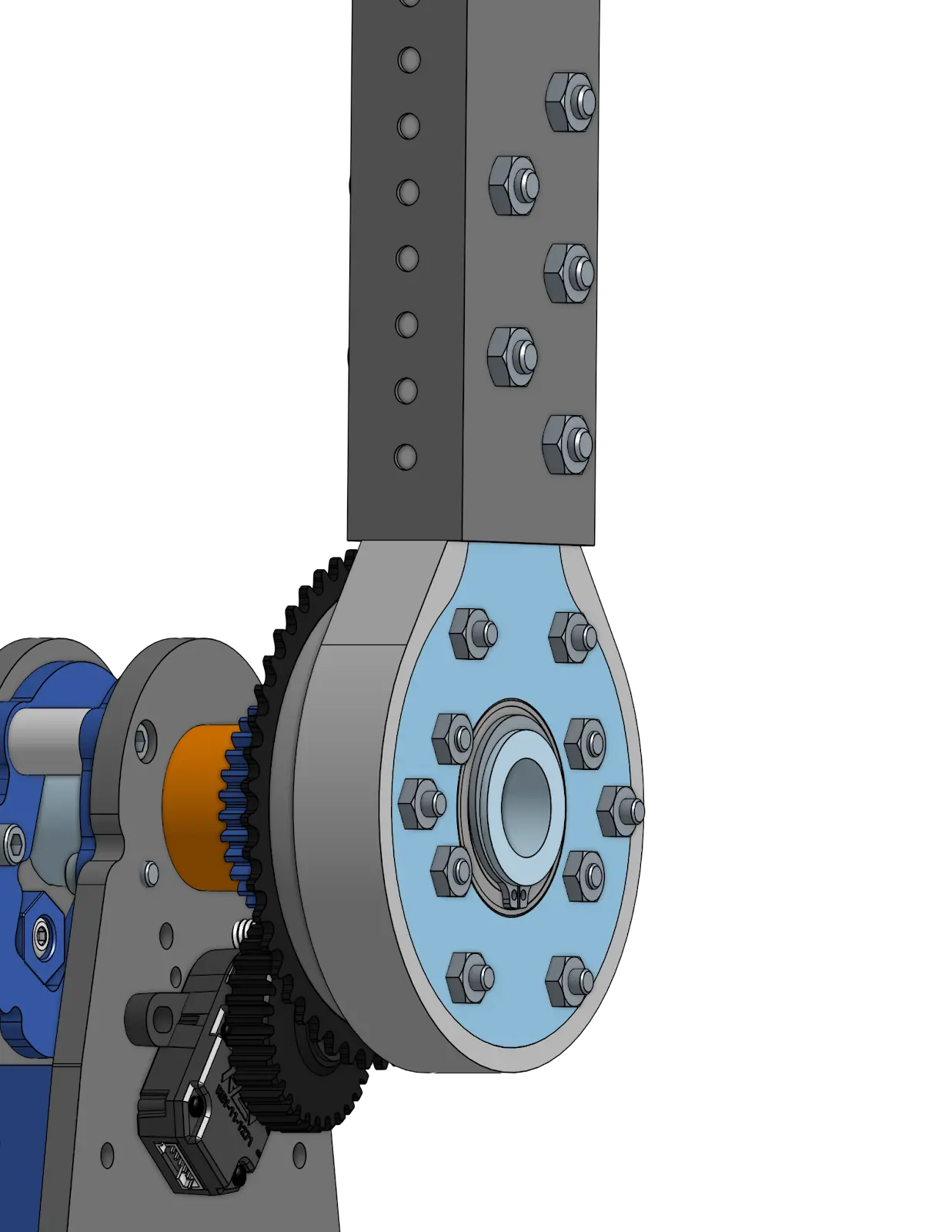
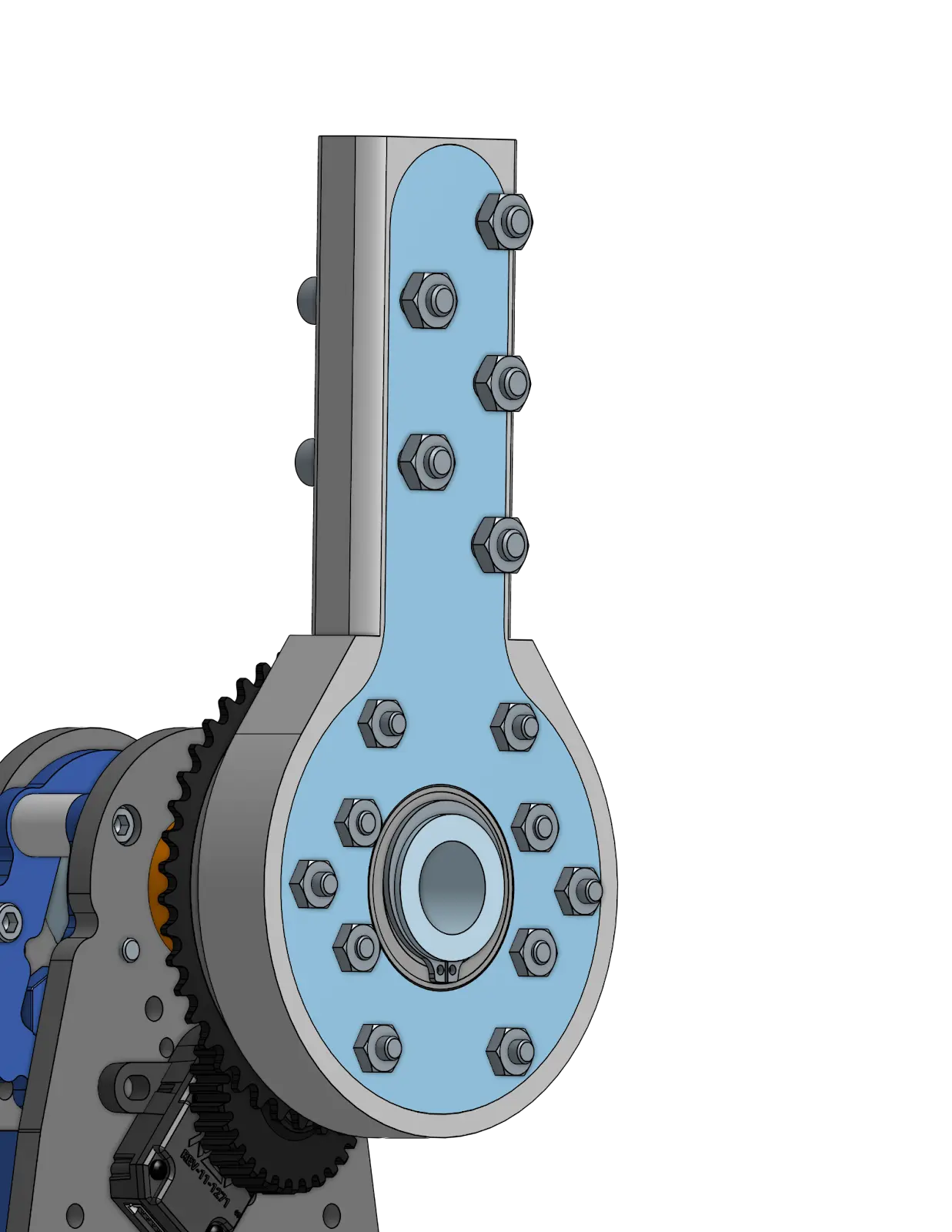
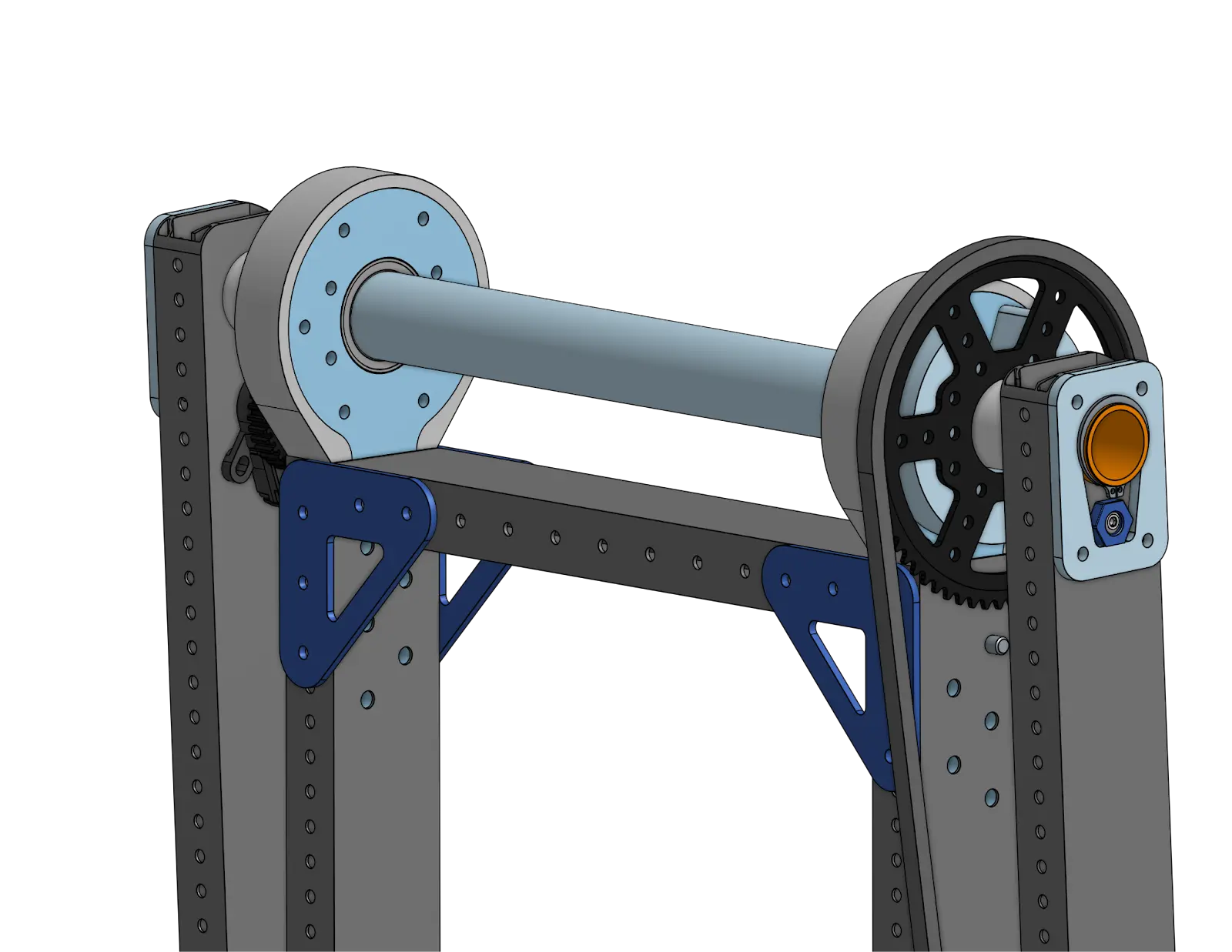
Şanzıman 3 kademedir (+ zincir) toplam 228:1 reduksiyona. Bu kola ağırlık ekleyecektir, ancak önceki çözüme göre nispeten alçakta yer alır ve daha düşük backlash için ağırlığı takas etmeye istekliyiz. Şanzımanın çıktısı, ikinci bağlantıya bağlı olan kasnağa zincirle bağlıdır. Kasnak, dead axle etrafında boşluk için merkezi 1.375'e büyütülmüş Rev 64t maxspline kasnağıdır. Kasnak, eklem ile through cıvatalarla monte edilmiş Pa12-CF naylon filamentinde yapılan 3d baskılı bir spacer ile ekleminden spacered edilir.
İkinci eklem, önceki tasarıma göre significantly daha fazla bracing'e sahiptir. Artık ikinci bağlantı boyunca giden tam 1/16 duvar 2x1'lerimiz olacak, önceki ½ hex geçişine kıyasla. Gussetler, onarılabilirliği sağlamak için çapraz 2x1'e perçinlenecek ve MAXtube'ye cıvatalanacaktır.
Bilek stackup, önceki ile tam olarak aynı olacak, aynı uç organ ve encoder/zincir sistemi ile.
Bu Pivotu Burada Hareket Halinde Görün
Tip
Videoları izlemek için resimlere tıklayın.

