1678'nin Rapid React Toplayıcısı
Bağlantı
Tasarım Arkasında
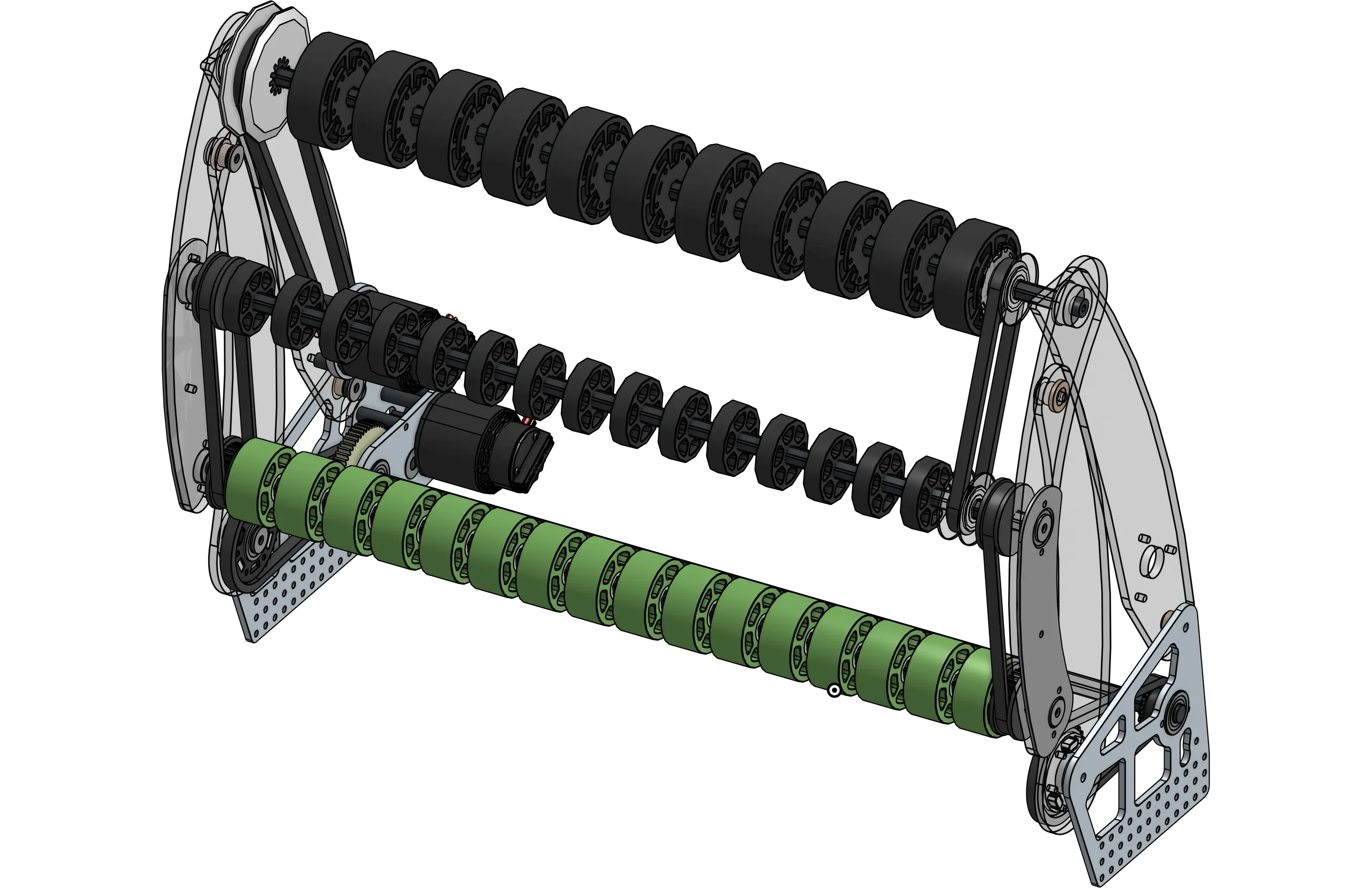
4 çubuklu OTB toplayıcılar oyun parçalarını yerden çekip robotun içine almak için yapılır, ancak bunu yaparken kendilerini riskli bir durumda tutarlar. Robotun çerçeve çevresinin dışında otururlar ve saha ve diğer robotlarla çarpışmalardan kaynaklanan hasara karşı savunmasızdırlar. Tüm OTB toplayıcı tasarımları, çarpışmalara ve hasara karşı dayanıklı olma, hızlı ve hafif olma tasarım gereksinimlerinden büyük ölçüde etkilenir.
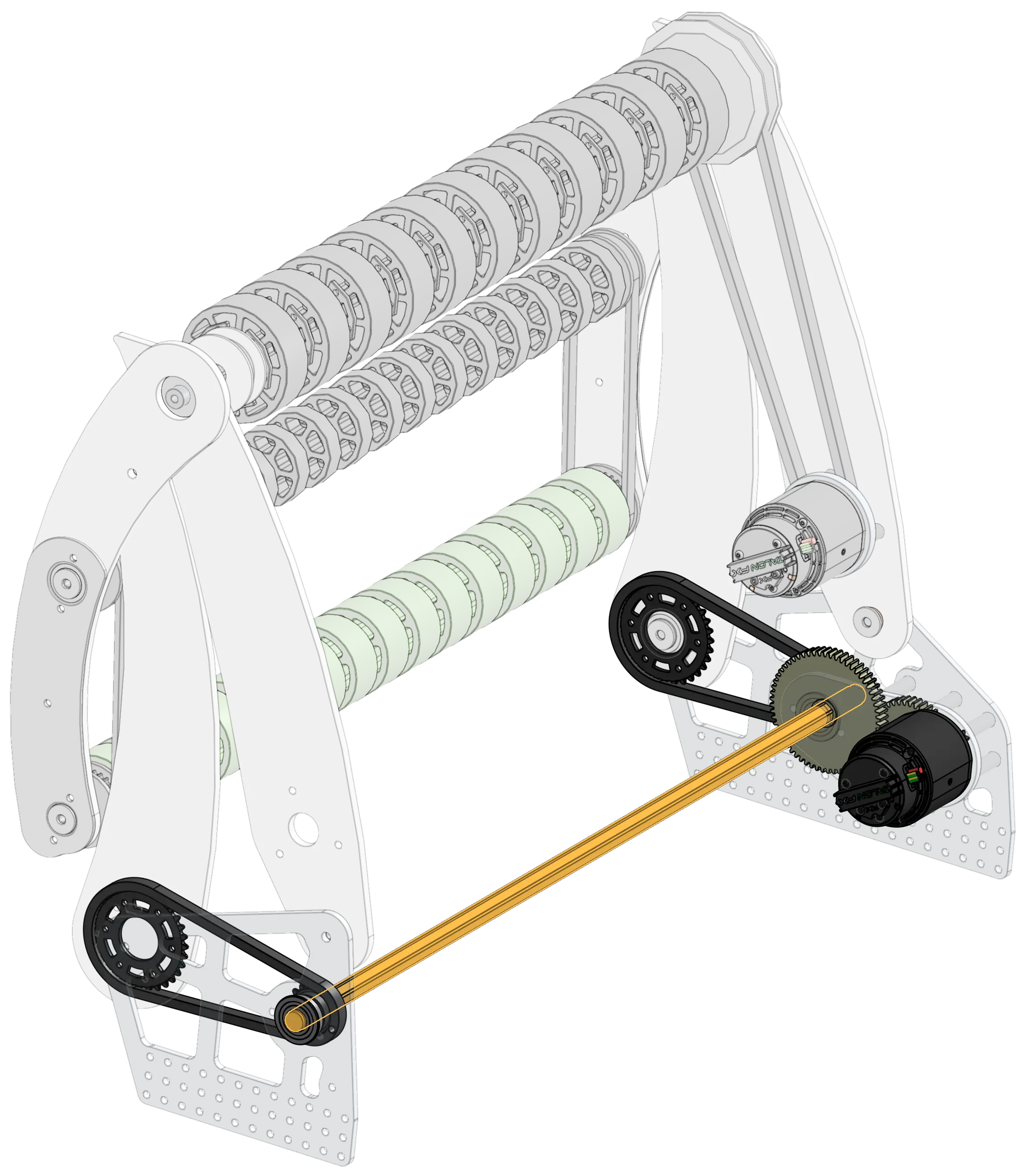 |
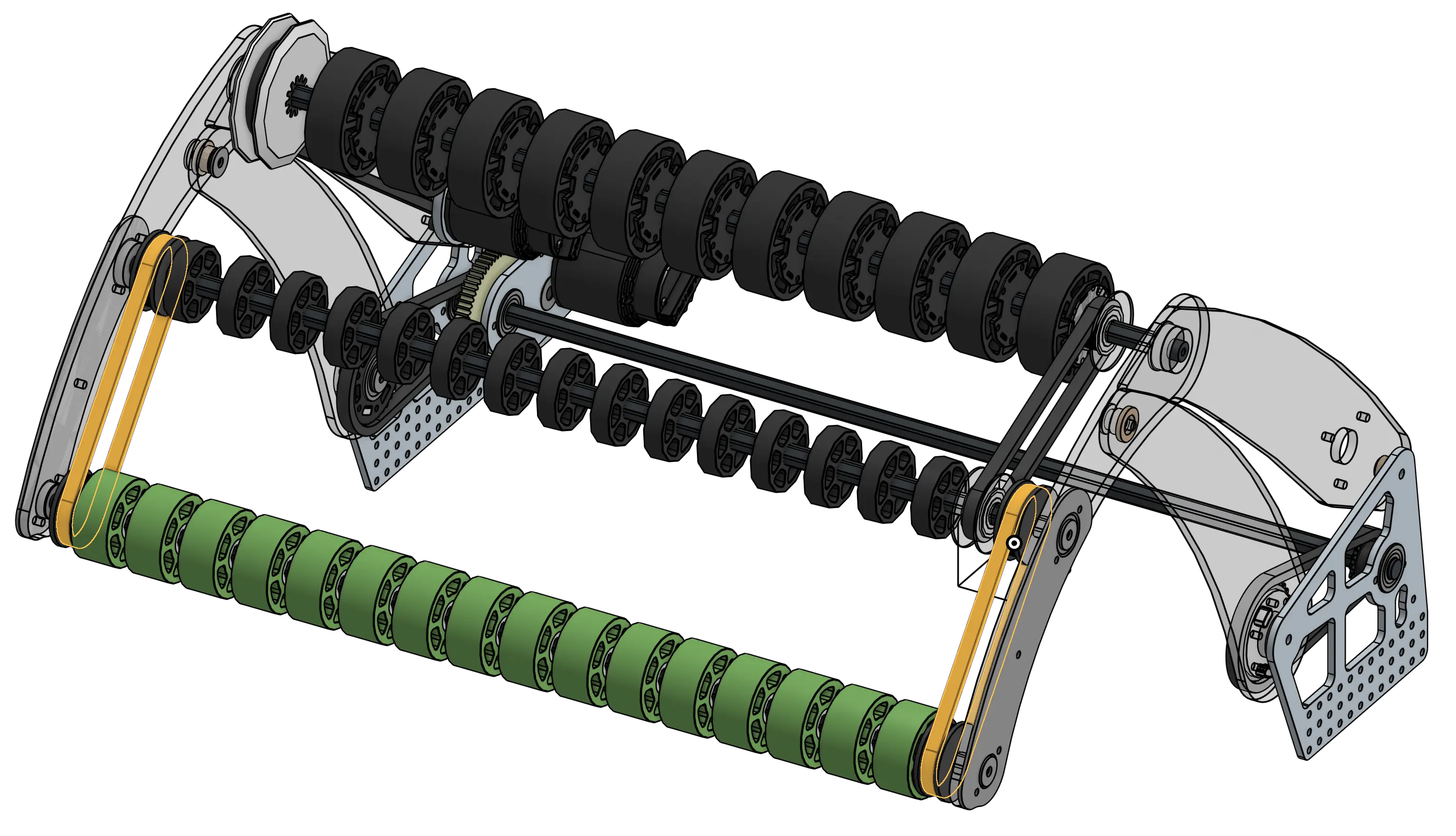
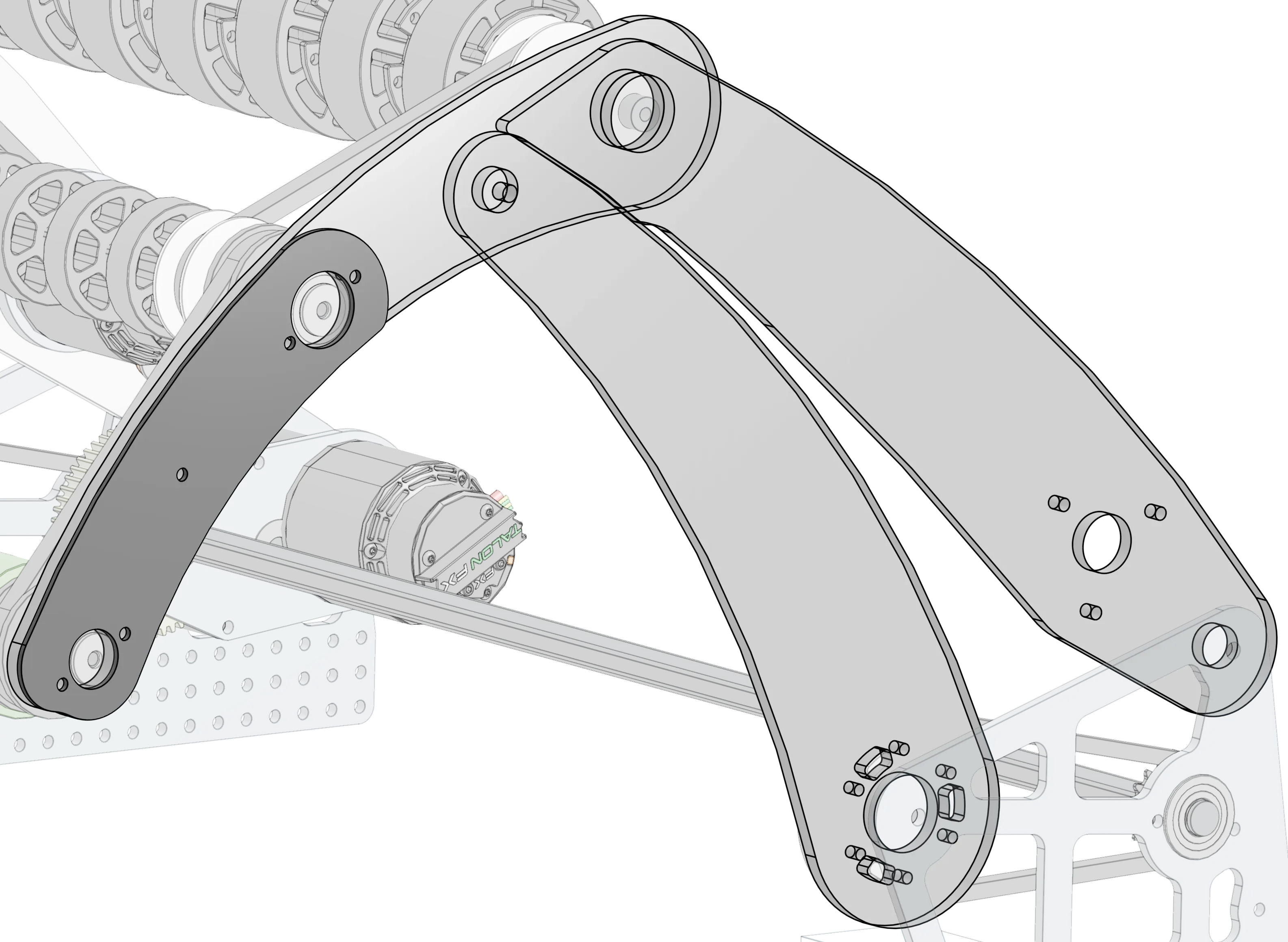
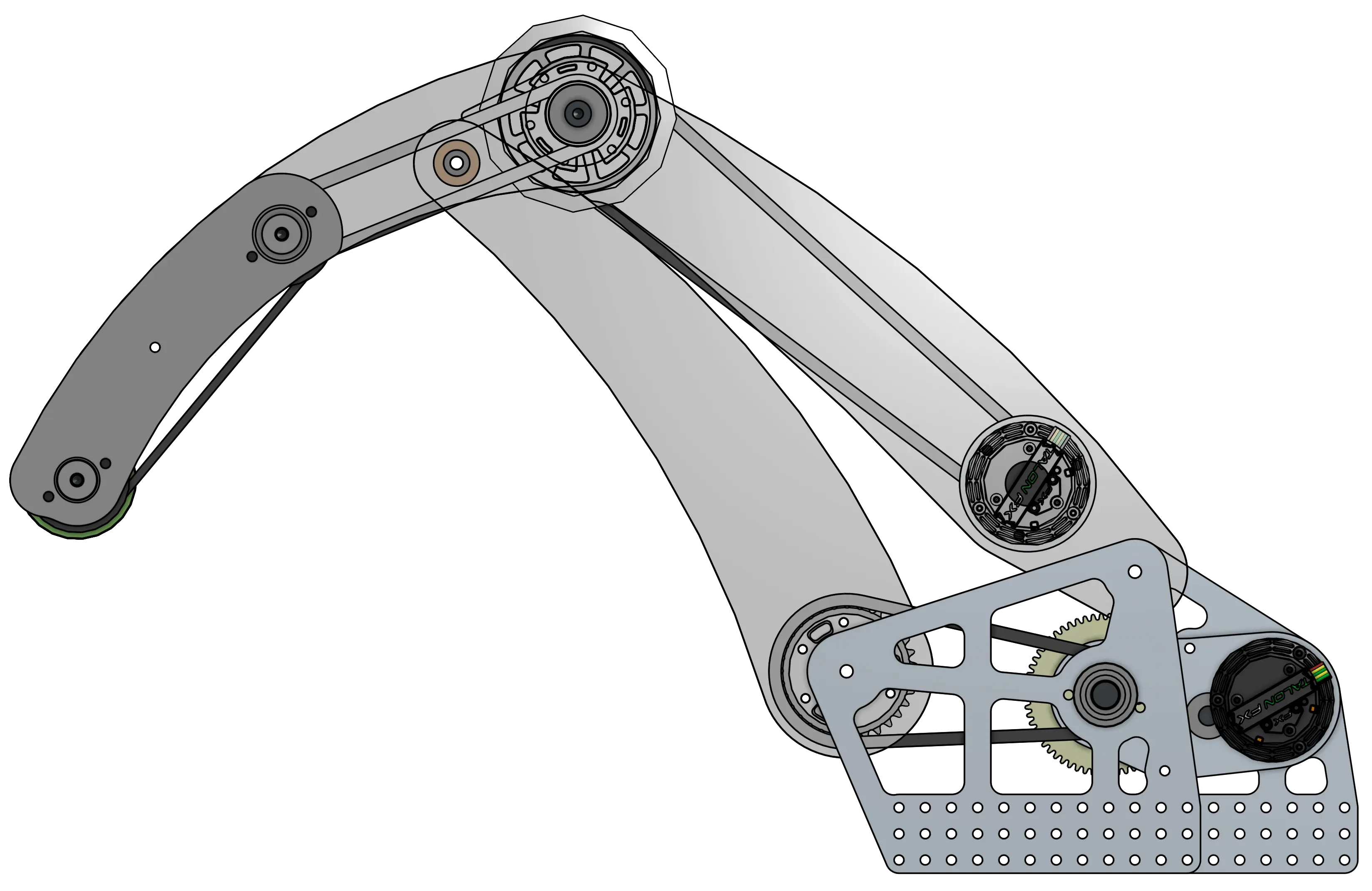
OTB toplayıcıları hızlı ve hassas hareket etmelidir, bu yüzden onları güçlendirmek için iyi bir seçenektir. 1678, 30:1 oranına sahip tek bir Falcon 500 kullandı. Bu toplayıcı, gücü toplayıcının her iki tarafına aktarmak için bir tork transfer şaftı (resimde sarı ile vurgulanmıştır) içeriyordu. Toplayıcı pivotunun her iki tarafını sürmek, tüm toplayıcının uzatma ve geri çekme yükleri altında bükülmesini önler. Pivot本身, 32t plaka dişlisinde zincir ile sürülür. Son indirgeme ve güç iletimim için zincir kullanımı, şok yüklerini emme yeteneği nedeniyle optimaldir. |  |
| Toplayıcı silindirleri bir Falcon 500 ile güçlendirilir ve güç HTD 5mm zamanlama kayışları kullanılarak aktarılır. Toplayıcı, "touch it own it" tasarım felsefesi ile tasarlanmıştır ve sürücü için toplamayı mümkün olduğunca kolaylaştırmak için robotun tam genişliğini span'ler. Toplayıcı, silindirlerin yüzey hızının yaklaşık robotun hızının 2.5x'i olacak şekilde "dişlilidir" (kayış ve kasnak reduksiyonlarını kullanarak). Bu, robotun tam hızda toplara sürerken bile topları toplamasına izin verir. Tekerleklerin her seviyesi de birbirine bağlıdır, böylece farklı çaplarına rağmen eşit yüzey hızlarına sahip olurlar. |  |
Bu toplayıcı, hayatta kalma ve sağlamlığını artırmak için birçok özel husus içerir
 |
 |
 |
Toplayıcı plakaları, güç/ağırlık oranı ve deformasyon sonrası orijinal şekline dönme yeteneği nedeniyle en yaygın toplayıcı malzemesi olan 1/4" polikarbonattan üretilir. Bu toplayıcı, kırılmaya en yatkın alanlarda ekstra alüminyum takviyeye sahiptir. |
 |
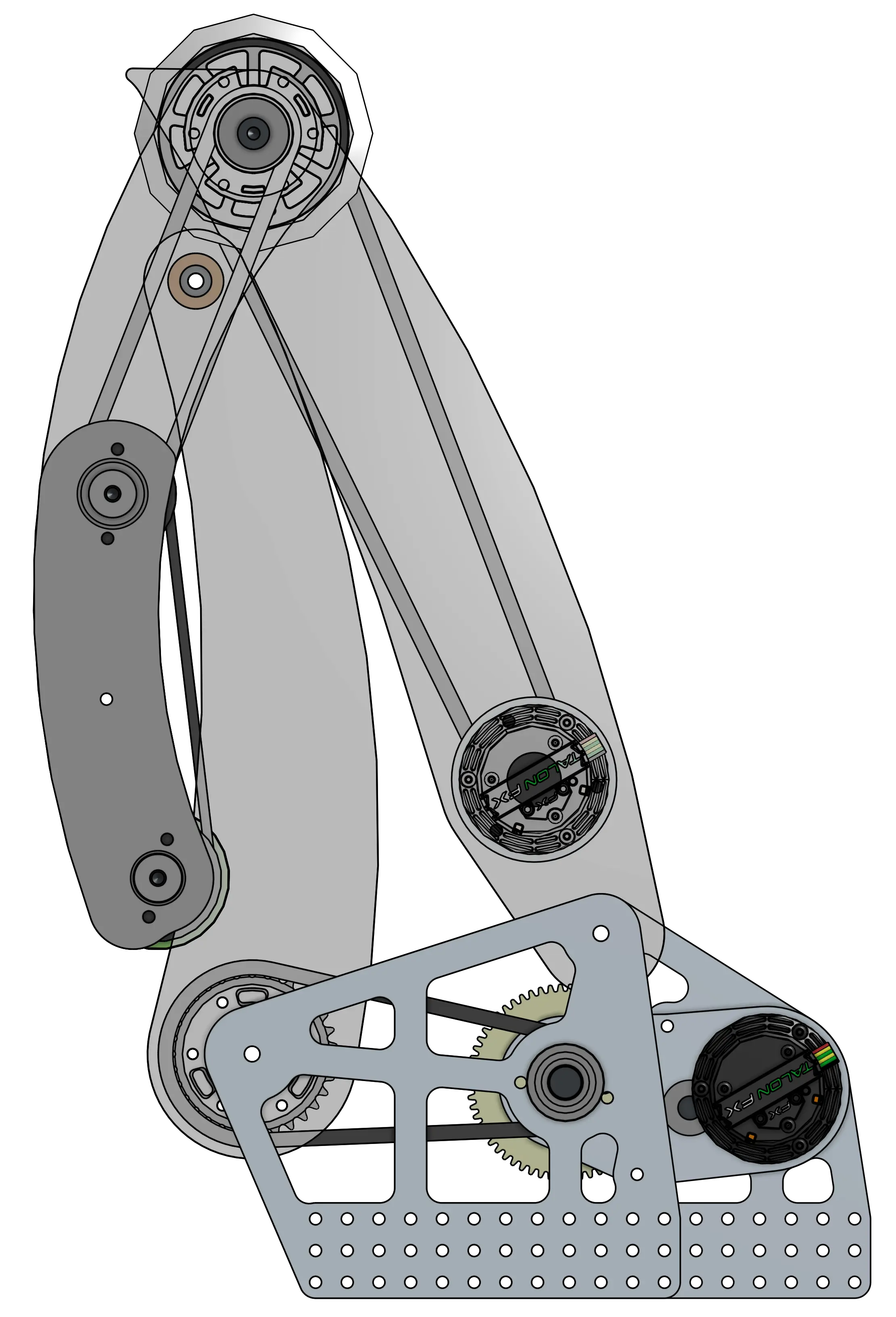 |
1678, toplayıcı polikarbonat plakalarını tamamen uzatılmış ve geri çekilmiş pozisyonlarda birbirlerinde hardstop olacak şekilde tasarladı. Bu, toplayıcıyı programlamayı kolaylaştırır ve toplayıcının çerçeve çevresi uzatma sınırını geçemeyeceğini kanıtlayarak robotun muayeneden geçmesine yardımcı olur. Pnömatik aktüatörlü bir toplayıcıda, pivot plakalarının hardstop olması, pnömatik pistonun strokunda biraz hata payına izin verir. *** ##
Bu Toplayıcıyı Burada Hareket Halinde Görün
!!! Tip Videoları izlemek için resimlere tıklayın.
*[WCP]: West Coast Products *[REV]: REV Robotics *[TTB]: The Thrifty Bot *[Redux]: Redux Robotics *[OTB]: "Over the Bumper" typically used to refer to a style of intake where you lift the piece over the bumper *[UTB]: "Under the Bumper" typically used to refer to a style of intake where you move the piece under the bumper *[COTS]: Commercial Off the Shelf parts are anything you can buy from a vendor. *[V4B]: "Virtual 4 Bar" is where a second degree of freedom is directly geared of a previous degree of freedom instead of being moved independently or by a linkage. *[MCM]: Mcmaster Carr *[C-C]: "Center to Center" distance *[turnbuckle]: A threaded part that goes in between chain links to tension the chain *[COG]: Center of Gravity, also referred to as COM(Center of Mass) *[4Bar]: A type of linkage characterized by its 4 pivot points *[Deadaxle]: A type of axle setup where the axle is fixed in place and or is not transferring the torque of the system through it. *[Deadaxles]: A type of axle setup where the axle is fixed in place and or is not transferring the torque of the system through it. *[deadaxle]: A type of axle setup where the axle is fixed in place and or is not transferring the torque of the system through it. *[Liveaxle]: A type of axle setup where the main torque transfer is through the axle. *[liveaxle]: A type of axle setup where the main torque transfer is through the axle. *[Zombie-Axle]: Typically used on pivots a zombie axle spins with the mechanism, but is transferring little to no torque through it. This is commonly used to put an encoder on the pivot point. *[Tube-Nut]: Also known as a "Star Nut", these provide an easy way to put a thread in end of a hollow tube allowing you to bolt the tube to another part. *[tube-Nut]: Also known as a "Star Nut", these provide an easy way to put a thread in end of a hollow tube allowing you to bolt the tube to another part. *[Cantilever]: Horizontal Element that's supported by one side only. *[cantilever]: Horizontal Element that's supported by one side only. *[Shear]: When forces are applied parallel to the plane of a material, causing breaking of fasteners due to excessive force and stress. *[shear]: When forces are applied parallel to the plane of a material, causing breaking of fasteners due to excessive force and stress. *[Torque]: Force that produces rotational movement. *[torque]: Force that produces rotational movement. *[PDH]: Power Distribution Hub. *[SparkMAX]: Motor controller for REV motors. *[PWM]: Pulse Width Modulation cable. *[RIO]: RoboRIO, brain of the robot. *[Blinkn]: LED controller for REV. *[Radio]: Device that helps the robot communicate with the driver station. *[radio]: Device that helps the robot communicate with the driver station. *[3DP]: Abbreviation for 3D printed or 3D printing. *[Gusset]: Reinforcement plate, usually made of aluminum, used to strengthen connections between two tubes. *[gusset]: Reinforcement plate, usually made of aluminum, used to strengthen connections between two tubes. *[poly]: Abbreviation for polycarbonate. *[Poly]: Abbreviation for polycarbonate. *[pc]: Abbreviation for polycarbonate. *[PC]: Abbreviation for polycarbonate. *[Stripping]: Process of removing threads or bolt heads, often due to excessive force or wear. *[stripping]: Process of removing threads or bolt heads, often due to excessive force or wear. *[Tapping]: The process of creating threads in a hole using a tap tool. *[tapping]: The process of creating threads in a hole using a tap tool. *[Billet]: Component machined down from a solid block of material. *[billet]: Component machined down from a solid block of material. *[Brainpan]: Flipped electronics bellypan. *[brainpan]: Flipped electronics bellypan. *[bellypan]: Plate for mounting electronics on the underside of your drivebase. *[Bellypan]: Plate for mounting electronics on the underside of your drivebase. *[hardstop]: A physical limit designed to prevent a mechanism or component from moving beyond a certain point. *[softstop]: A software-based limit or control mechanism that restricts the movement of a mechanism or component to prevent it from exceeding certain parameters. *[Hardstop]: A physical limit designed to prevent a mechanism or component from moving beyond a certain point. *[Softstop]: A software-based limit or control mechanism that restricts the movement of a mechanism or component to prevent it from exceeding certain parameters. *[DP]: Diametral pitch is the number of teeth per inch of the pitch circle. *[packaging]: The way in which you fit parts of your robot together in a space *[Packaging]: The way in which you fit parts of your robot together in a space *[backlash]: 'Slop' in a power transmission system; can wiggle back and forth without engaging the whole system *[Backlash]: 'Slop' in a power transmission system; can wiggle back and forth without engaging the whole system *[parametric]: Designed in a way that uses relationships between steps to maintain design intent *[Parametric]: Designed in a way that uses relationships between steps to maintain design intent